科技巨頭搶灘車路協同 網絡技術如何重構未來交通新生態
隨著自動駕駛技術進入深水區,車路協同(V2X)作為其關鍵支撐技術,正迎來前所未有的關注。全球科技巨頭——從谷歌、華為到百度、騰訊——紛紛加速布局,資本市場亦聞風而動。這場由“單車智能”向“車路云一體化”的范式轉移背后,究竟隱藏著怎樣的技術邏輯與產業機遇?
一、車路協同:從“單車視角”到“上帝視角”的升維
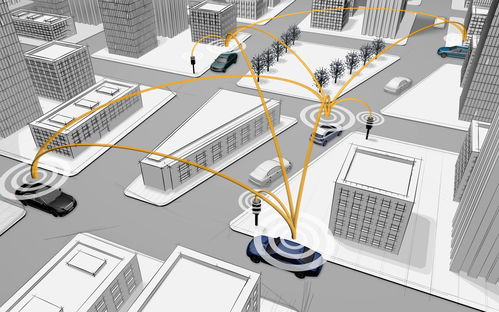
傳統自動駕駛依賴車輛自身的傳感器(如激光雷達、攝像頭)感知環境,可形象比喻為“盲人摸象”——即便感知能力再強,仍存在視線遮擋、惡劣天氣等天然局限。車路協同技術通過部署于道路、信號燈、建筑物上的智能設施(路側單元RSU),與車載單元(OBU)實時通信,將交通信息從“端”延伸至“云”,構建起一個全域、全天候的“上帝視角”。這不僅大幅提升了感知范圍與可靠性,更通過協同決策優化了通行效率與安全性。
二、科技巨頭為何競相入場?
- 技術協同效應:對于已深耕人工智能、云計算、物聯網的科技企業而言,車路協同是其技術棧的自然延伸。例如,華為憑借5G與邊緣計算優勢,可提供“云-管-端”全套解決方案;百度Apollo則依托高精地圖與AI算法,構建車路云一體化平臺。
- 數據價值洼地:車路協同產生的實時交通數據(如車輛軌跡、路況事件)是訓練AI模型、優化城市管理的珍貴資源。科技公司通過參與基礎設施建設,有望在未來的數據生態中占據核心地位。
- 政策東風強勁:中國《智能汽車創新發展戰略》等政策明確將車路協同納入新基建范疇,各地示范區與先導區已進入規模化試點階段。企業入場既能搶占標準制定先機,也可獲得政府項目與補貼支持。
三、網絡技術:車路協同的“神經系統”
車路協同的實現高度依賴低延遲、高可靠的通信網絡,其技術開發主要圍繞兩大路線展開:
- 基于蜂窩網絡的C-V2X:以5G/5G-A為核心,利用其大帶寬、低時延特性支持高清地圖實時下載、遠程監控等高數據量業務。3GPP標準持續演進,推動網絡切片、邊緣計算等技術在車聯網場景落地。
- 專用短程通信DSRC:基于IEEE 802.11p協議,在特定頻段實現車輛與基礎設施間的直接通信。雖部署較早,但在覆蓋范圍與演進能力上逐漸被C-V2X超越。
當前,我國主導的C-V2X路線已成為主流。技術開發焦點集中于:
- 融合感知:通過多傳感器數據與通信信息的時空對齊,生成超越單一傳感器的融合感知結果;
- 邊緣智能:在路側部署算力單元,實現本地化實時分析,減少云端傳輸壓力;
- 安全與隱私:開發基于區塊鏈的信任框架、數據脫敏技術,保障通信安全與用戶隱私。
四、挑戰與未來展望
盡管前景廣闊,車路協同仍面臨跨部門協同難、投資回報周期長、標準尚未完全統一等挑戰。未來技術發展將呈現三大趨勢:
- 云邊端協同深化:通過分級計算(云端訓練、邊緣推理、車端執行)實現資源最優配置;
- AI與通信融合:利用AI預測交通流,動態優化通信資源調度;
- 商業模式創新:從政府主導轉向“政府+企業+用戶”多元共投,探索數據服務、出行即服務(MaaS)等新型盈利模式。
車路協同不僅是技術的革新,更是交通系統與社會治理的深刻重構。當科技巨頭的算法遇見城市的脈搏,一場關于效率、安全與體驗的出行革命,正沿著每條智慧道路悄然駛來。
如若轉載,請注明出處:http://m.jsbit.cc/product/40.html
更新時間:2026-05-18 03:39:10